9.4.2015-  - Nový článek o GPS trackeru. Vyhledávám, vyhledáváš, vyhledáváme...
- Nový článek o GPS trackeru. Vyhledávám, vyhledáváš, vyhledáváme...
22.3.2015- Nové videjko + v přípravě článek o gimbalu / stabilizaci kamery
1.2.2014- Recenze rámů Hobbyking X550 a X666 od Elkory.
30.10.2013- Trochu předělán FAQ.
11.10.2013 - Nový návod na stavbu alternativního rámu TBS Discovery.
24.7.2013 - FPV videjko z hradiště Zámka z Prahy. Pracuji na odstranění vibrací.
20.7.2013 - Nový článek o přeprogramování G-OSD pro zobrazení HOME ARROW.
19.7.2013 - FPV videjko z Libčice nad Vltavou.
13.7.2013 - Nový článek o FPV. FPV podruhé a lépe.
11.7.2013 - Přibyl seznam řídicích desek. Autor Elkora mi bude posílat aktualizované verze seznamu na doplnění.
10.7.2013- Další HD FPV video z Bořanovic.
9.7.2013- Nové FPV video.
5.7.2013 - Menší redesign.
16.5.2013 - Návod na vyvážení vrtulí
16.5.2013 Přidán alternativní návod na výrobu rámu od uživatele Elkora Rám se neosvědčil, Elkora bude nadále referovat o svých zkušenostech.
20.3.2013 - Přidán FAQ pro začátečníky.
1.3.2013 - Přidán TIP na lepší připevnění motoru v článku o stavbě rámu.
23.2.2013 - Přidána videa. Cizí neštěstí určitě nejvíce pobaví.
16.1.2013 - Znovu aktualizován článek o vyvážení. Nyní je stroj pěkně stabilní a můžeme se věnovat FPV :-)
11.1.2013 - Návod na výměnu ohlé osy motoru.
6.1.2013 - Aktualizován článek o FPV.
3.1.2013 - Aktualizován článek o vyvážení a přidáno video
3.1.2013 - Vítejte v Novém roce. Byl přidán návod na možnou opravu nabíječky/balancéru iMAX B6. V budoucnu přibude povídání o co možná nejlepší stabilizaci multikoptéry s Multiwii.
13.12.2012 - Přidána nová sekce Videa vašich multikoptér. Uveřejněte zde své video multikoptéry nahrané na Youtube. Stačí mi poslat odkaz.
25.11.2012 - Forum rozšířeno. Přidáno video.
11.10.2012 - Článek o FPV aktualizován.
22.9.2012 - Nový článek o FPV. Článek bude doplňován postupně.
11.9.2012 - Nová kamerka na trhu (,,více v rozpis a objednání součástek"
6.9.2012 - Přidána videa
31.8.2012 - Vyřešeny nožičky (,,stavba rámu")
30.8.2012 - Práce na článku ,,konfigurace a první vzlet" pokračují a budu zde neustále přidávat postupy
29.8.2012 - Přidáno video
Seznam řídicích desek [od Elkory] [průběžně aktualizováno]
8bits
MWC mwii SE crius

price:30$
ATMEGA328P
Flash (Kbytes):32 Kbytes
počet pinů :32
Max. Operační frekvence:20 MHz
CPU:8-bit AVR
vstupních kanálů:16
Hardware QTouch Acquisition:No
Max I/O Pinů:23
Ext přerušení:24
USB Speed:No
USB Interface:No
1×16-bitový časovač / čítač, 6xPWM kanály, 8-kanálový 10-bit ADC, USART, SPI Serial Interface, 2-vodičové sériové rozhraní (Philips I2C kompatibilní)
ITG3205
Tříosý digitalní gyroskop
na jednom integrovaném obvodu s citlivostí
14.375LSBs za °/sec a plné
stupnice rozsah ± 2.000 °/sec
Sériové rozhraní I2C, rychlý režim(400kHz)
tři integrované 16-bit ADC poskytuje simultánní vzorkování gyros, Přitom nevyžaduje externí multiplexer
BMA180
trojosý akcelerometr
Ultra vysoký výkon g-senzor (ultra-low šum, ultra-vysoká přesnost) s 14 bitovým ADC operacemy
256bit EEPROM pro kalibrační data a uživatelská data
BMP085
barometrický senzor(výškový)
Hlídače tlaku Rozsah: 300-1100 hPa (9000 m do–500m nad hladinou moře)
Až 0.03hPa / 0,25 m rozlišení
2-pin na I2C rozhraní
HMC5883L
3 osé magnetoresistivní čidlo (elektronický kompas)
Široké magnetické pole rozsah (+ / -8 gauss)
1 až 2 stupně přesnosti kompasu přesnost v ose citlivosti a linearity
I2C digitální rozhraní
Fast 160 Hz maximální výstupní rychlost
————————————————————————————————————————————————————————–
Crius All In One PRO
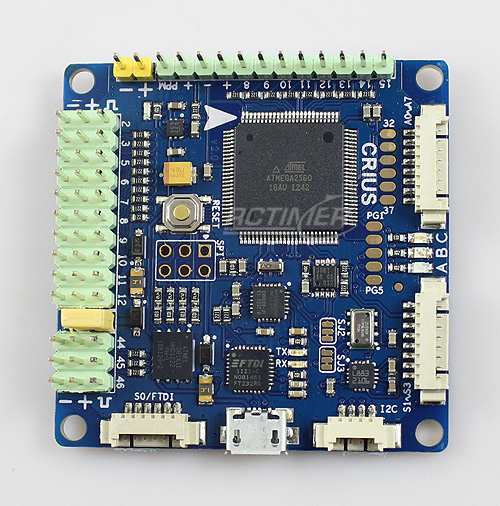
56.99$
ATMEGA 2560 Microcontroller
Flash (Kbytes): 256 Kbytes
Pinů osazenot: 100
Max. Provozní frekvence: 16 MHz
CPU :8-bit AVR
(ATMEL AVR 256kB Flash, 8kB SRAM, 4kB EEPROM, 2x8bit + 4x16bit časovače, Real Time Counter, 12xPWM, 4xUSART, SPI, JTAG, vnitřní kalibrovaný Oscilátor, 16MHz max.., 2,7 V 5,5 V AZ, TQFP100)
Hardware QTOUCH Akvizice: Ne
Max I / O pinů: 86
Ext Přerušení: 32
Rychlost rozhraní USB: Ne
USB rozhraní: Ne
SPI: 5
MPU6050
6ti osé gyro / zrychlení s jednotkou Motion zpracování
stupnice rozsah ± 2.000 ° / sec
13.1LSBs za ° / sec a plné zrychlení plný rozsah stupnice: ± 2-16g
Accel Citlivost :16000-2000 LBS / g
HMC5883L
3 osé magnetoresistivní čidlo (elektronický kompas)
Široké magnetické pole (± 8 gauss)
1 až 2 stupně přesnosti kompasu
Přesnost v ose citlivosti a linearity
I2C digitální rozhraní
Fast 160 Hz maximální výstupní rychlost
MS5611-01BA01
vysoce přesný výškoměr
Tlakový rozsah: 10 – 1200mbar
Rozlišení: 0.012mbar / 0,1 m
Přesnost (25 ° C, 750mbar): ± 1.5mbar
FT232RQ USB-UART čip a Micro USB zásuvka
————————————————————————————————————————————————————————–
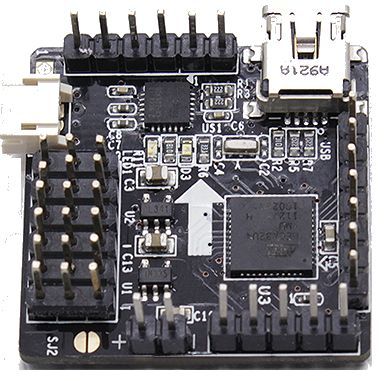
v4r6 PARIS Sirius™ CPU IMU Multiwii Plug-n-Play Board with USB

ATMEGA328P
Flash (Kbytes): 32 Kbytes
Pinů na procesoru: 32
Max. Provozní frekvence: 20 MHz
CPU :8-bit AVR
vstupních kanálů: 16
Hardware QTOUCH Akvizice: Ne
Max I / O pinů: 23
Ext Přerušení: 24
Rychlé rozhraní USB: Ne
USB rozhraní: Ne
podpora bloutooth
Senzory jsou umístěné zvlášť na desce s gelovým podkladem, aby byly co nejlépe izolovány od vybrací:
Sirius ™ Navigator IMU s Gyro / ACC / Baro / Mag ITG3205/BMA180/BMP085/HMC5883L
3xgyro: Rychlý režim I2C (400kHz) sériové rozhraní
• Volitelné externí hodiny vstupy 32,768 nebo 19.2MHz pro synchronizaci se systémovým časem
ACC: ± 1 g ± 16 g AZ… A / D převodník 14bit/12bit… SPI/I2C VÝSTUP… napájení 1,6-3,6 V
Baro: měřicí rozsah 300-1100 hPa s absolutní přesností výšky až 0,03 hPa
http://www.multiwiicopter.com/pages/videos/
———————————————————————————————————————————————————————–
kk multicontroler SMD v5.5 blackboard

£75.00
Toto je poslední v.5.5 KKmulticontroller, která je továrně vyráběná s plnou podporou. Používá Murata piezoelektrické gyros, které byly začleněny do desky design pro robustnost.Stabilizátory gyro sestava se připojují zvlášť na desku pájením. Tyto gyroskopy se ukázaly jako velmi odolné proti vibracím, zatím ze všech gyro, co jsme testovaly.
Deska je dodávána v černé barvě s modrou LED a má na palubě System Programming (ISP) záhlaví pro snadnou aktualizací firmwaru pomocí programátoru.Na palubě ATmega328P nebo ATmega168 čip dává uživatelům prostor navíc možnost načíst rozšířený firmware s vyšší obnovovací frekvencí pro vyšší stabilitu.
Tři nastavitelné potenciometry mohou zvýšit nebo snížit zisk gyra pro všechny tři osy (Otočení, Sklon a vybočení) a může být použit ke kalibraci HSR a zvrátit gyroskopické pokyny v případě potřeby během předletové nastavení.
Deska má také šest ESC / Servo pinů, které umožňují multicopter konfigurace od 2 do 6 rotorů. Tam jsou také piny pro křidélka, výškovka, plyn a směrovka připojení z RC přijímače (RX). Deska je dodávána se čtyřmi 3pin propojkami pro připojení RX modulu snadno a rychle. Tato deska nyní přichází s vlastním programátorem, takže uživatelé mohou rychle a snadno programovat a aktualizovat kterýkoliv firmaware jenž se jim bude líbit na desce.
ATMEGA328P
Flash (Kbytes):32 Kbytes
počet pinů :32
Max. Operační frekvence:20 MHz
CPU:8-bit AVR
vstupních kanálů:16
Hardware QTouch Acquisition:No
Max I/O Pinů:23
Ext Interrupts:24
USB Speed:No
USB Interface:No
1×16-bitový časovač / čítač, 6xPWM kanály, 8-kanálový 10-bit ADC, USART, SPI Serial Interface, 2-vodičové sériové rozhraní (Philips I2C kompatibilní)
ATMEGA168
Flash (Kbytes): 16 Kbytes
Pinů na procesoru: 32
Max. Provozní frekvence: 20 MHz
CPU :8-bit AVR
vstupních kanálů: 16
Hardware QTOUCH Akvizice: Ne
Max I / O pinů: 23
Ext Přerušení: 24
Rychlost rozhraní USB: Ne
USB rozhraní: Ne
Tohle je vyráběno v mikro smd standardu, a vetšinu věcí si tu musí člověk spájet sám a nějak mi není jasný jestli jsou senzory součástí dodávky (nejsou…. )..
————————————————————————————————————————————————————————–
HobbyKing KK2.0 Multi-rotor LCD flight control board

$29.99
Flash (Kbytes): 32 Kbytes
Pinů na procesoru: 44
Max. Provozní frekvence: 20 MHz
CPU :8-bit AVR
vstupních kanálů: 16
Hardware QTOUCH Akvizice: Ne
Max I / O pinů: 32
Ext Přerušení: 32
Rychlost rozhraní USB: Ne
USB rozhraní: Ne
Gyro: InvenSense as
Akcelerometr: Anologue Devices Inc
Auto level: Ano
LCD = pár gramů navíc, ale hezká to věc.. Senzory jsou tři..nevím jaké, ale na 90% od atmegy 180/085/5883L
——————————————————————————————————————————————————————————
Multiwii Nanowii ATMEGA3U4 micro
$19.99
CPU: ATmega32U4
Rychlost procesoru: 16MHz
Flash Velikost: 32 kB (3.3kB pro Bootloader)
Vstup: 6 x high-res RX vstupy AUX (2 kanály)
Výstup: 6 až 8 výstupy pro motory (motor 1-6ar 11-bit PWM)
Rozměry: 30x30x16mm
Hmotnost: 6,5 g
6 RX vstupy
6 HW PWM @ 11bit (lepší rozlišení, plynulejší reakce)
Až 8 motory nebo servopohony
Invensense MPU6050 6–osý gyroskop a akcelerometr (podporuje automatické úrovně)
palubní USB
UART konektor (pro bluetooth, GPS telemetrie, DSM2 satelit atd.)
I2C konektor (pro barometr nebo magnetometr umožňující držení a udržování výšky)
————————————————————————————————————————————————————————–
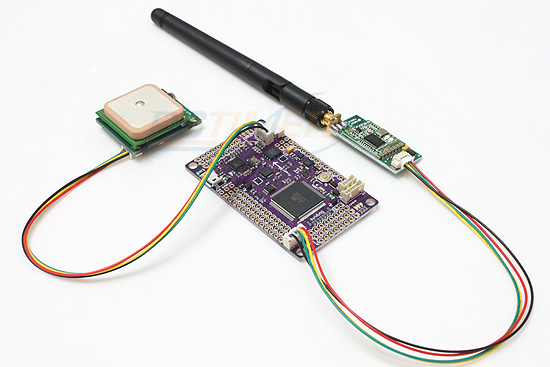
Multiwii PRO flight controler w/MTK GPS
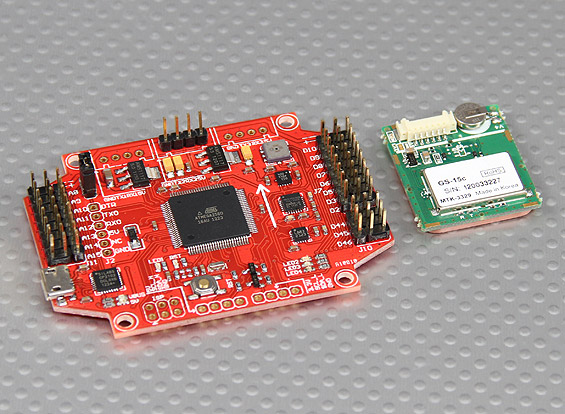
$64.99
6 RX vstupy
6 HW PWM @ 11bit (lepší rozlišení, plynulejší reakce)
Až 8 motory nebo servopohony
Invensense MPU6050 6-osý gyroskop a akcelerometr (podporuje automatické úrovně)
palubní USB
UART konektor (pro bluetooth, GPS telemetrie, DSM2 satelit atd.)
I2C konektor (přidání barometru nebo magnetometru pro přesnější držení a udržování výšky)
(MultiWii PRO)
SMD komponenty design s ATmega2560
ITG3205 Triple Axis Gyro
BMA180 Akcelerometr
BMP085 Barometr
HMC5883L Magnetometer
Servo výstup pro kamera – gimbal
Podporuje přímé připojení GPS modulu (MTK 3329 GPS modul v ceně)
On-board USB připojení pro programování
(MTK 3329 GPS modul)
Na základě MediaTek jediném čipu architektury.
Frekvence L1, kód C / A, 66 kanálů
Vysoká citlivost, až-165dBm tracking, který poskytuje vynikající výkon ve městě
podpora DGPS (WAAS, EGNOS, MSAS) (volitelný firmware)
USB / UART rozhraní
Podporuje funkce AGPS (Režim offline: EPO platí až 14 dnů)
instalace, zprovoznění: http://www.rcgroups.com/forums/showthread.php?t=1726790
—————————————————————————————————————————————————————————-
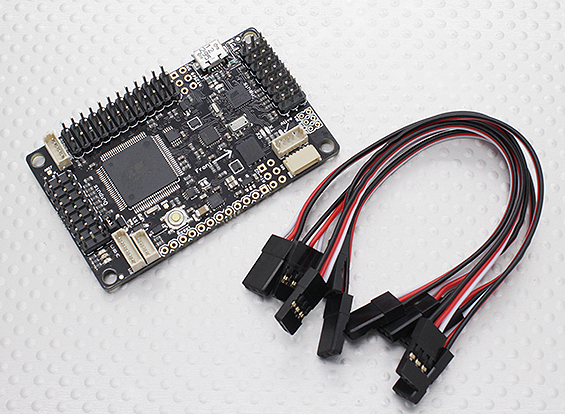
Multiwii and megapirate AIO flight controler w/FTDI v2.0
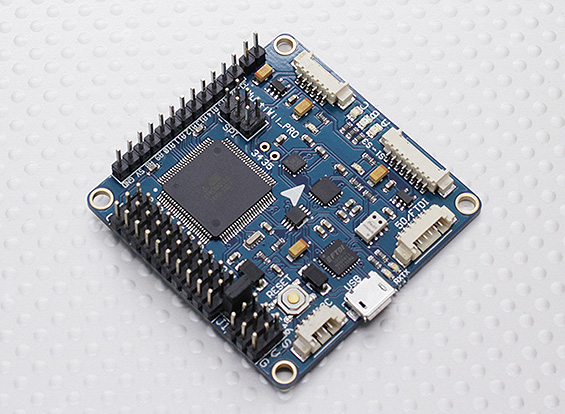
$48.99
Podporované MegaPirateNG a MultiWii firmware
připojení až 8mi motorů
8 vstupních kanálů pro standardní přijímač
4 sériové porty pro ladění / Bluetooth modul / OSD / GPS / telemetrie
2 serva výstup pro naklánění a otáčení kamerového systému
1 servo výstup pro vyvolání spoušťě fotoaparátu
6 Analogových výstupů pro rozšíření zařízení
I2C port pro prodloužení snímače nebo zařízení
Samostatné 3.3V a 5V LDO regulátor napětí
ATMega 2560 Mikrokontrolér
MPU6050 6 osé gyro / zrychlení s jednotkou Motion zpracování
HMC5883L 3-osý digitální magnetometr
MS5611–01BA01 vysoce přesné výškoměr
FT232RQ USB-UART čip a Micro USB zásuvka
Na desce logiky převodník úrovní
Acro, Level, Alt Hold, Heading lock
Tato deska má více sériového rozhraní, stejně jako speciální rozhraní I2C. Nyní můžete připojit GPS přímo, a stále máte další porty pro další externí zařízení. Kromě toho, nový ATmega 2560 má více IO pinů, takže to může číst PWM signál z přijímače a má dostatek PWM výstupů0 pro ovládání HSR přímo, bez nutnosti dělat PWM signálu v oblasti softwaru.
Tento regulátor má dokonce i microUSB portu přímo na desce, není třeba připojit další FTDI USB rozhraní.
Snímání pohybu straně je novou generaci MEMS gyro MPU6050 o InvenSense, která má MEMS Gyro / Akcelerometr čidlo na jediném čipu. K dispozici je také 3-osý magnetometr a barometr snímač s rozlišením 0,01 mbar – přibližně 10 cm výškový rozdíl.
step by step: zde
user manual: zde
manual by Gaza07: zde
————————————————————————————————————————————————————————
Flyduino MEGA Flight Controller CPU Board

Atmel Atmega 2560 16Mhz
Řada mikrkontrolerů AVR z produkce firmy Atmel je založena na zcela nové architektuře. Jedná se o obvody s pravou architekturou RISC, u které není oddělena vnitřní krystalová časovací frekvence. Například 10-MHz řídicí krystal znamená průchodnost příkazů procesorem až do 10 milionů instrukcí za sekundu. Díky relativně nízké pracovní frekvenci zůstává odběr proudu velmi malý. Všechny modely AVR disponují programovatelnou pamětí typu flash, dále mají datovou paměť typu EEPROM a je možné u nich programovat jejich systém. Flash paměti typu OnChip a paměti EEPROM lze úspěšně programovat pouhým přenosem příkazů. Proces programování pamětí není nutné realizovat připojováním napěťových vodičů. Obvody AVR mají 32 rovnocenných registrů, které umožňují paralelní přístup. Instrukční sada obsahuje 120 instrukcí, takže lze tvořit maximálně efektivní programy.
Typ ATMEGA2560-16AU
10bit A/D kanály: 16
Počet 16-bitových časových spínačů : 4
Počet 8-bitových časových spínačů : 2
Clock Speed : 16 MHz
Paměť (EEPROM) : 4 kB
Paměť FLASH : 256 kB
I/O piny : 86
Paměť (RAM) : 4 kB
Rozhraní SPI : 1
Dvoudrátové rozhraní (TWI) : 1
Počet UART : 4
Napájecí napětí U(CC) : 4,5 V – 5,5 V
Splňuje RoHS Ano
Kontroler čistě bez senzorů, ty se dokupují zvlášť na desce flyduinosenze:10DOF IMU GY-86MPU6050+HMC5883l+MS5611. Což dělá dalších 43,90 €
———————————————————————————————————————————————————————–
FY-DOS-A&GPS Autopilot For Multi-rotors

$149.00 (aliexpress.com)
Letové mody:
Attitude Stabilized Mode – DOS automaticky vyrovnává pitch a roll(klonění, klopení)do roviny 0° maximum je 45°, páčkou pitch a roll můžete přímo ovládat let, maximální úhlová rychlost je 150°/s. Páčka vybočení ve středové poloze uzamkne současný kurz, jeho koncový bod odpovídající maximální rychlost otáčení 135°/s , páčkou yaw můžete lineárně řídit rychlost otáčení .Páčkou Throttle ovládáte stoupání a klesání. stoupání a klesání je přímo závyslé na plynu.
Hovering Mode – modul GPS, musí být připojeno alespoň 5 satelitů. Ovládání je stejné jako u satbilizačního módu.DOS může automaticky kontrolovat letovou stabilitu.stoupání a klesání je přímo úměrné plynu, když je páka plynu ve středové poloze, DOS automaticky uzamkne výšku, maximální rychlost stoupání je 3 m/s, v minimální výšce pokles jen 1,5 m/s. Páčkou throttle přímo ovládáte stoupání rychlost stoupání a klesání.pitch a roll na středu uzamkne pozici, pokud je signál dostačující. Při pohybu páček se budete pohybovat v daném směru (max 6m/s) bez letové stabilizace .
Auto Return To Launch Mode(RTH) – modul GPS , musí být připojeno alespoˇ5 satelitů. V tomto režimu DOS převezme veškerou kontrolu. Po přepnutí do režimu RTH, (DOS má 20 metrů výšky ochranného limitu , pokud je spínací bod výška pod 20 metrů , bude DOS automaticky stoupat na 50 m ) sezačne automaticky vracet do vzletového bodu, při zachování výšky. Po dosažení VB , jednotka se automaticky přistane a uzamkne motory.
Camera Gimbal Stabilization – DOS multi- rotor firmware , pokud je použita k ovládání letadla v 6.osách , můžete současně ovládat dvě osy Camera gimbal stabilizace
DOS je možné propojit s Hornet-OSD a dataradio
First Person View (FPV) – Může být připojen na Hornet – OSD, letové údaje překryjí video výstup, a prostřednictvím přenosové soustavy lze video poslat zpět, to vám umožní vychutnat si legraci z FPV a bude jednodušší pracovat pomocí FPV s funkcí automatic balance, Hovering and Auto Return To Launch.
telemetrie v reálném čase – pomocí telemetrie v reálném čase sledovat stav létání, pomocí rádiových dat prodloužit vzdálenost ovládání.
Základní vinformace:
Podporované vícerotory: Quadcopter I4, X4 / Hexacopter I6, X6, IY6, Y6/Octocopter I8, X8
Podporované ESC výstup: 400Hz obnovovací frekvence
Doporučený Vysílač: PCM nebo 2,4 GHz s minimálními 5 kanálů
Provozní rozsah napětí: DC 4.8V ~ 5.5V (0.15A @ 5V), Powered by ESC
Provozní teplota: -10°C ~ 50°C
Systémové požadavky: Windows XP SP3 / Windows 7 / Windows 8
letové vlastnosti:
přesnost ve vysu: Vertikálně:±0,8m, Horizontálně: ±2,5m (GPS Mode)
Maximální úhlová rychlost vybočení: 150°/s
Max Úhel náklonu: 35°
stoupání/klesání:-1.5m/s ~ 3m/s
Rozměry a váha:
DoS 25g (47×30×11mm)
GPS 24g (32×32×13.5mm)
http://www.feiyu-tech.com/product-en.php?id=29
——————————————————————————————————————————————————————————-
FY-41AP-M&GPS Autopilot For Multi-rotors

$289.00
FY-41AP má stejné letové vlastnosti jako FY-DOS, navíc má integrovaný OSD video overlay system, který umožňuje přenášet telemetrická data o napájení, rychlosti, výšce a směru letu. Podporuje PAL i NTSC
velikost a váha:
FY-41AP: 34g (58×37×19mm);
GPS :24g (32×32×13.5mm);
Air speed senor:9g (64×13.5×13.5mm);
Power Manager:35g(50×24×18mm)
test OSD:
test hoverhold:
16bits
AIOP V2.0 UAV 433Mhz Autopilot GPS Flight Control System

$108.99
Vlastnosti hardware:
Podporované MegaPirateNG / ArduCopterNG / ArduPlaneNG / MultiWii / AeroQuad firmware
připojení až 8mi rotorů
8 vstupních kanálů pro standardní přijímač a PPM SUM vstupní kanál
3 výstupy pro serva gimbal systému
4 porty pro ladění / Bluetooth / GPS / OSD / telemetrický modul
8 analogových portů pro snímače rychlosti / napětí a proudu Sensor / LED ovladač
D32 ~ 37 a ~ PG1 PG5 podložky
I2C 5V port pro externí zařízení
Palubní 16Mbit DataFlash čip pro automatické zapisování
ATMega 2560-16AU Mikroprocesor
MPU6050 6 osa gyro / zrychlení s jednotkou Motion zpracování
HMC5883L 3-osý digitální magnetometr
MS5611-01BA03 vysoce přesné výškoměr
USB-UART FT232RQ čip a Micro USB zásuvka
Na desce logiky převodník úrovní
Přizpůsobte standard RoHS
Rádio RCTimer telemetrický systém je s 3DR systémem 100% kompatibilní.
Je koncipován jako otevřený náhradní zdroj XBEE rozhlasovým kanálem, který nabízí nižší cenu, delší rozsah (cca jedna míle) a vynikající výkon na XBEE rádií. Je k dispozici v 915MHz, a v těchto konfiguracích: sériové desky (ve vzduchu) a USB (na zemi).
Systém poskytuje plně duplexní spojení pomocí HopeRF v HM-TRP moduly běžící vlastní, open-source firmware. Rozhraní modulu je přes standardní 5V-tolerantní TTL / FTDI USB ser.
Aktualizace firmware a konfigurace jsou plně podporovány v APM Mission Planner. Konfigurace je také možný přes 3DR rozhlasu konfigurátoru a AT příkazů.
GPS CN06 Vlastnosti:
Samostatný přijímač GPS
U-blox NEO-6M GPS modul
EEPROM pro trvalé uložení konfigurace
Velikost 25x25mm aktivní antény
UART (TTL) port s EMI ochrany
Dobíjecí baterie pro zálohování/horký start
Výchozí parametr
Přenosová rychlost: 9600
Pokud se přijímač GPS použít pro I2C-GPS NAV desky, musí být změněn na přenosovou rychlost 115200 / rychlost aktualizace 5Hz.
Obsah balení:
AIO PRO FC V2.0 x 1
CN06 V2.0 x 1
RCTimer Rádiová telemetrie Kit 433MHz x 1
—————————————————————————————————————————————————————————-
32bits
DJI NAZA

NAZA+GPS cca 10000 Kč
- Vestavěné funkce Autopilot, Tail Gyro, Engine Governor, Flybarless, Return-to-Home Fail Safe
- Podporované typy vrtulníků elektrický, interní napájení combusion
- Podporované typy cykliky Normální, tři serva 120 ° / 140 ° / 90 °, čtyři serva 90 °
- Podporované serva 500Hz (760us) / 200Hz (1520us) pro kanál kormidla; Jiné se řídí na výstupu přijímače.
- Doporučený vysílač PCM nebo 2,4 GHz s minimálními 7 kanály a odolné proti poruchám funkce na všech kanálech
- Doporučené Napájení DC 7,4 ~ 8.4V (nesmí překročit max. provozní napětí servomotoru)větší než 4000 mAh kapacity, vybíjecí proud více než 5C
- Příkon MAX 5W(0.9A@5V, 0.7A@5.8V, 0.5A@7.4V, 0.4A@8V)
- Provozní teplota -5 ° C až +70 ° C (Pokud je IMU v teple, používáte-li stroj při nízké teplotě, může být i o -10°C nižší.)
- Paměť 4GB Flash Memory pro záznam letových informací
Vznášející Přesnost:
± 0,5 m vertikální/horizontální ± 1 m
Vhodné do větru <8 m/s (17,7 mph)
Vpřed/vzad Rychlost ± 72 Km/h (44,74 mph)
Levá/Pravá rychlost ± 56,7 km/h (35,77 mph)
Přesnost GPS Mode:
Vertikální: ± 0,8
Horizontální: ± 2,5 m
Max vybočení úhlová rychlost 200°/s
Max Úhel náklonu 45 °
Výstup/sestup ± 6 m/s
Rozměry:
Hlavní Controller 61 mm x 39,6 mm x 15,8 mm
IMU 40 mm x 31 mm x 26 mm
GPS a kompas 50 mm (průměr) x 9 mm
Celková hmotnost <= 150 g
Co se procesoru a senzorů týče, nezjistil jsem zatím nic…nic. Procesor bude určitě něco z rodiny cortex a u desky těchto kvalit čekám i zdvojení, ne li zrtojení senzorů(3xACC,3xMAG,3xRATE), ale to je jen moje dedukce…zatím. Samozřejmě se tím v budoucnu budu ještě zabívat, ale pokud někdo seženete spolehlivý odkaz, na nějaké bližší technické parametry, budu nesmírně vděčný, když ho dáte do příspěvků
Ještě nutno dodat, že ač se s tím dá lítat takříkajíc „z krabice“ bez jednotky VU, která se stará o napájení NAZY a o komunikaci s PC přes USB, se zřejmě neobejdete, ale ta bývá v setu započítaná.
NAZY jsou dvě: NAZA-Multirotors a NAZA-Heli
DJI-WOOKONG

Je trošku vyspělejší než NAZA. Je určena spíš pro pofesionální a komerční trh. Pro coptery nad 600mm průměr.
Obsahuje vlastní řídící jednotku, jednotku IMU, ve které jsou všechna čidla zvlášť, navíc jsou to čidla nejvyšší kvality, kalibrována a hlídaná softwarovou charakteristikou redující změny teploty. A je zde samozřejmě zabudovaný autopilot, který umožní lety po waynpiontech k čemuž je vyhrazena pamět 4Gb!
Typy vícerotorů: Quad-rotoru / Hex-Rotor / Octo–Rotor
Podporované ESC výstup: 400Hz obnovovací frequencys
Doporučený vysílač: PCM nebo 2,4 GHz s minimálně 5 kanálů a failsave na všech kanálech
Doporučená Napájení: DC 4,8 ~ 12V
Příkon: max. 5W (0.9A @ 5V, 0.7A @ 5.8V, 0.5A @ 7.4V, 0.4A @ 8V)
Provozní teplota: (Máte-li IMU v teple, pokud chcete použít při nízké teplotě, může být -5°C nižší) -5°C až +60°C
Letové výkony (může být efekt mechanickým výkonem)
Vznášející Přesnost:
Vertikální: ± 0,5 m
Horizontální: ± 2 m
Vhodné do větru: <8 m/s (17,7 mph)
Maximální úhel náklonu: 35 °
Vertikální rychlost: 6 m/s
————————————————————————————————————————————————————————–
Rabbit Flight Controller for Quadcopter Multicopter Fixed Hight Direction Care Free CF w/ ESC Connection Board

85$
32 bit 50 MHz CPU
Rotor: ± 2000dps, 16 bit, rozlišovací frekvence: 1000Hz
Akcelerometr:-8G, 14 bit, rozlišovací frekvence: 800Hz
Multi-funkce: lze připojit ultrazvukové, tlakoměrové, tri-osé magnetické snímače, GPS, tak řízení pevnou výškou, pevně nastavený směr, a self-lift-and-down funkci.
8 kanálový dálkový vstup a 8 kanálový motor / servo výstup.
Podpora letecké snímkování a PTZ Self-Balance.Output režim může být nastaven uživatelem.
Díky rozhraní USB, Aktualizace PC a nastavuje parametry bez rozšiřující desky.
Pokud máte jakýkoliv problém s palubě Rabbit Control, neváhejte a kontaktujte nás (goodluckbuy.com @gmail.com).
– S povolením od Rabbit továrny, budeme poskytovat technickou zálohování pro vás.
– Rabbit FC nemůže být dodán do Číny, Twain, HongKong, Makro, koupeno z těchto oblastí by měl být vrácen.Ono tak je to bohužel se všemy kopiemy z číny..
– Optinal output mode: Default ESC output 330MHZ.47HZ servo output, Servo/ESC output option:50Hz(20ms);100Hz(10ms);270Hz(3.6ms);330Hz(3ms);500Hz(2ms Special ESC);2KHz PWM(Special ESC)
Možno použít ultrasonic pro přesné řízení u země. Podpora ESC 500HZ a 2KHz
—————————————————————————————————————————————————————–
Rabbit II Flight Control with High-precision Barometer & Digital Compass for Quadcopter Multicopter

Je lepší varrianta za 118 babek, v pouzře a svylepšenými čipy:
32 bit 72 MHz CPU
– 10 kanálový, 16 bitový výstupní kanály, podpora 10-osa nebo 8-osa 2 osa kamery gimbal, můžete nastavit 50Hz ~ 500Hz analog / didital servo nebo nestandardní ESC singal.
– Podpora max. 10-osa, s různými porty, podpora bluetooth, telemetrie pozemní stanice, OSD, sériový port, IIC zařízení a tak dále
– S výkoným zvukovým a světelným batery allarmem
– S kompaktním ochranným krytem
– Podpora 140g mini quadcopter.
– Podpora Hexcopter, Octacopter, FPV Multicopter a tak dále
– S vysoce přesným 3-osým gyroskopem a 3-osým akcelerometrem s kompaktní strukturou a velikostí
– 8 CH na pijímačí, dá se nastavit pomocný přepínač kanálů a ovpládání PTZ
– Podporuje mix-ovládání: GIM-BAL, BI, TRI, QUADP, QUADX, Y4, Y6, HEX6, HEX6X, OCTOX8, OCTOFLATP, OCTOFLATX, FLYING_WING, FIEXD WIND režim a tak dále. lze přidat další režim v závislosti na požadavku uživatele.
– Poskytuje PC nástroje pro upgrade Fireware, Convienent uživatelům nastavit parametr a stáhnout novou bránou firewall.
– Podporuje quad-osa, hex-os, osm osa quadcopter (Nelze se připojit k PTZ jako všechny kolíky slouží k připojení motoru)
– 8 LED pro indikaci různé singalové režimy,možnost nastavit parametry kdykoliv i pro malé seřízení. Lze připojit barevné LED páseky, pro velkolepý a jedinečný noční let.
– Podporuje 4S test nízkého napětí baterie.
– Nastavení alarnu umožnuje:nastavit nízkou spotřebu, ale i funkce postupně zesíleného alarmu v závislosti na poklesu napětí.
– Podpora ultrazvukového portu, díky stabilní výskové funkci rozsah 2m, perfektní výkon zejména pro těsné pozemní rízení.
– S funkcí zařízení SELFCHECK, ujistěte se, že máte let pod kontrolou!!. se zvukem a světelný signál pro vlastní kontrolu postupů.
– S vysoce přesným 3-osým gyroskopem a 3-osým akcelerometrem, usnadňují uživatelům přidávat funkce, jako je automatické přistání a Fixed-point,HOME (stačí koupit další desku a stáhnout on-line aktualizace software je v pořádku).
– S nezávislým výzkumem a vývojem software, můžete zlepšit nebo přidat nové funkce, dle požadavků uživatele.
– Dobrovolný režim výstupu: Výchozí ESC výstup 330MHZ.47HZ servo výstup, Servo / ESC volba výstupu: 50Hz (20ms), 100Hz (10ms), 270Hz (3.6ms), 330Hz (3 ms), 500Hz (2ms Speciální ESC); 2KHz PWM (zvláštní ESC)
– U funkce: Auto stability, 3D senzace, výška Lock, Head Lock, PTZ stabilita, Autolanding, bezstarostné (CF)
– U provedení GPS, můžete je realizovat founction: Go Home, Alt hold, atd.
———————————————————————————————————————————————————————-
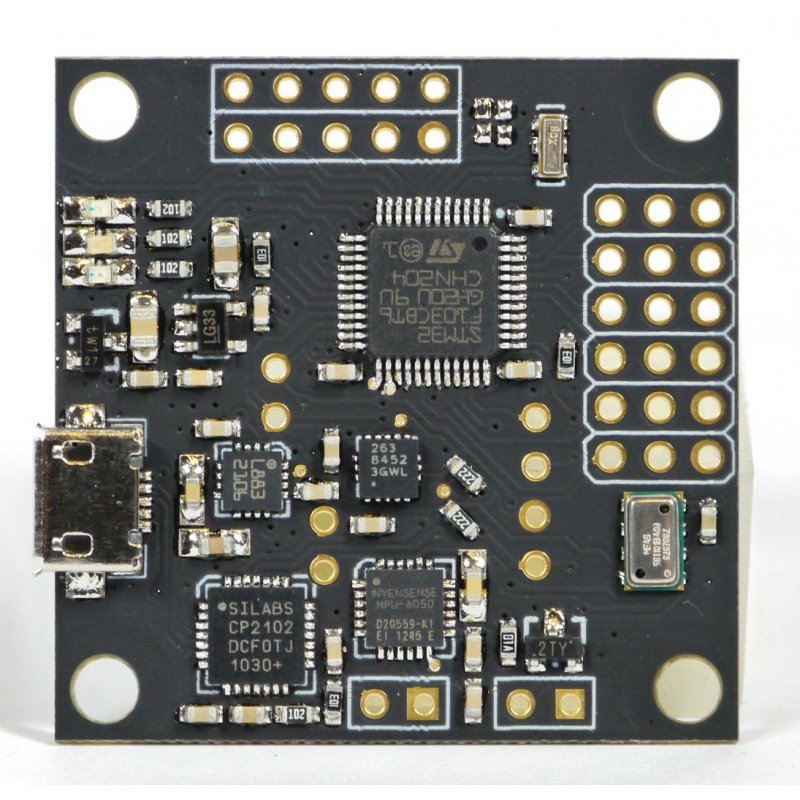
Flyduino MW32
47,90 €
stm32f103 (32bit MCU)
Zahrnuje ST Microelectronics STM32F103 High-Performance mikrokontroler s 128kBytes z paměti
Mikrokontrolér 32-bit ARM Cortex-M3 procesor běží až na 72MHz
Přímé Full-Speed USB pro připojení k počítači (USB 2.0)
Plně sestavený a Ready to Run
Slot na SD kartu
jeden variabilní trimpotem nastavitelný analogový vstup
8 Red test LED
Hodiny reálného času se záložní baterií
JTAG konektor
LCD konektor s možností nastavení kontrastu
2 USART je pro RS232 připojení a stažení programu
Výkonová a Boot LED
Spouštěcí a reset tlačítka
Ideální pro STM32F103 programy pro vývoj a testování
6 + 8 PWM I / O lze přemapovat jako vstup nebo výstup pro RC/CPPM/motory/serva
druhý UART přístupné Spektrum Satellite RX nebo GPS
CPPM (až 12 kanálů) RC vstup
8 kanálový RC standardní PWM vstup
PWM (50 .. 1 kHz) výkon motoru až na šest motorů, mohou být přeřazena s jinými piny pro osm motorů + kamera stabilizaci
Palubní USB konektor pro aktualizaci firmware a telemetrie
Napětí baterie monitorování a nízkého napětí alarm
Bzučák pro alarm / upozornění uživatele
Invensense MPU3050 (3-axis gyro)
MPU6050 (Gyro and ACC)
6–osé gyro/ACC s jednotkou Motion zpracování
stupnice rozsah ± 2.000 °/sec
13.1LSBs za ° sec a plné
zrychlení plný rozsah stupnice: ± 2-16g
Accel Citlivost :16000–2000 LBS / g
Analog ADXL345 (digital accelerometer)
ADXL345 je malý, tenký, nízká spotřeba (40uA v režimu měření, 0.1uA v standby@2.5V), 3-osý akcelerometr s vysokým rozlišením (13-bit) Měření až do ± 16g. Digitální výstupní data formátována jako 16-bitový dvojkový doplněk a je přístupný buď SPI (3 – nebo 4-drát) nebo I2C digitální rozhraní.
MMA8452 (other ACC)
Xtrinsic MMA8451Q 3-Axis, 14-bit/8-bit digitální akcelerometr
± 2 g / ± 4g / ± 8g dynamicky volitelná v plném rozsahu
Kurzy výstupní data (ODR) od 1,56 Hz do 800 Hz
99 μg/√Hz šum
I2Cdigital výstupní rozhraní (pracuje na 2,25 MHz s 4,7 kΩpullup)
Bosch-Sensortec BMP085 (tlakový sensor)
tlakový senzor(výškový)
Hlídače tlaku Rozsah: 300-1100 hPa (9000 m do-500m nad hladinou moře)
Až 0.03hPa / 0,25 m rozlišení
2-pin I2C rozhraní na čipu
HMC5883L (Magnetometer)
3 osé magnetoresistivní čidlo (elektronický kompas)
Široké magnetické pole rozsah (+ / -8 gauss)
1 až 2 stupně přesnosti kompasu přesnost v ose citlivosti a linearity
I2C digitální rozhraní
Fast 160 Hz maximální výstupní rychlost
MS5611 (Barometer)
Tlakový rozsah: 10-1200 mbar
Vysoké rozlišení: 10 cm
čas datového přenosu: 0.5 ms
Vysoké rozlišení: 0,012 mbar a 0.002 ℃ – Přesnost: ± 1.5mbar; 0,8 ° C
3.5×3.5cm
Hardwarem nabitý akrobat, zatím asi nejlepší na trhu.
————————————————————————————————————————————————————————
Flyduino Autoquad 6 public beta Version

Set obsahuje:
Autoquad 6 deska// SMT-sestavená s Ublox LEA–6T pro přesné časování modulu GPS// IMU 9DOF analogové a jeden snímač tlaku
7 ks 2 * 3 PWM držáky
JST-PH hlavní napájecí kabel a elektrická zásuvka
35 * 35 mm keramická 15dB aktivní GPS anténa
2 „x 2.5“ Základní deska s MK montážní otvor vzor
Vstupní napětí: 9V => 18V
Vysoká účinnost DC/DC měniče
STM32F407 32bit Cortex M4 mikrokontrolér @ 168Mhz (1 MB flash)
Standardní 10 pin 0.05 „konektorová Rozteč SWD patice
14 univerzální PWM regulátory/přijímače (napájené, nebo beznapěťové @ 5V/1A)
Speciální Spektrum satelit (vzdálený přijímač) 2,4 GHz R/C rádio konektor
uSD slot poháněn 4BIT SDIO schopnou 100Mb s přenos (až 32GB pamětí)
palubní uBlox LEA–6T přesné načasování GPS modul se záložní baterií a timepulse zachytit
palubní U.FL (Ipex) aktivní antény GPS
Volitelný externí obousměrný telemetrie rádio (Xbee, Bluetooth, 433/868), přes standardní 6
pin FTDI konektor – napájení až 1A
I2C sběrnice pro připojení I2C ESC (nebo jiné zařízení I2C)
Palubní 9 DOF analogové senzory (3x RATE, 3x ACC, 3x MAG) w/EMI zpevnění
+ VectorNav VN100: (FC allready obsahuje 10DOF IMU! Je výkon podélně ve videích ze strany integrovaného Allready integrovaných 10DOF)
Vysoký výkon SOM (System-on-Module)
Jakákoli kombinace výše uvedených
Příplatková výbava: snímač tlaku pro měření vzdušné rychlosti
Napětí baterie Monitor
VectorNav VN100:
dodatečný modul s deseti senzory, pro ultrapřesnou navigaci
http://www.vectornav.com/Downloads/Support/PB-12-0002.pdf
Trošku lepší než wookong a za poloviční cenu… 😉
———————————————————————————————————————————————————————————-
APM 2.5 ArduPilot Mega 2,5 Multicopter Flight Control Board w / MTK GPS modul

$126.56
Kopie Arduflyer je nemlich to samé, na RCtimers za $98.99:
Tato nová prezentace ArduPilotMega 2,5 systém, má napájecí modul s integrovaným regulátorem na 5.3V napětí a snímáním proudu (XT-60 konektor, horní fotografie).
ArduPilot Mega 2.5 je kompletní open source autopilot systém a nejprodávanější technologie, která získala prestižní ocenění 2012 Outback Challenge UAV konkurenci. Tato verze je připravena k použití, bez nutnosti montáže. To umožňuje uživateli, aby se žádné pevné, otočné křídlo nebo multirotor vozidla (dokonce i auta a lodě) do plně autonomní vozidla, je možné je provádění naprogramovaných GPS mise s traťovými body.
Vlastnosti:
Podpora Arduplane, multicopter, Arducopter, vrtulník, Ardurover
Arduino kompatibilní!
Dodává se předpájenápájení (s přímými kolíky) a testována.
Zahrnuje 3-osé gyro, akcelerometr a magnetometr, spolu s vysoce výkonným barometru
Palubní 4 Mb DataFlash čip pro automatické zapisování
Digitální kompas poháněn HMC5883L–TR čipu Honeywell, nyní zahrnut na základní desce.
Volitelné off-board GPS Mediatek MT3329 GPS modul nebo uBlox LEA-6H GPS modul
Jeden z prvních open source systémů autopilota používat Invensense je 6 stupňů volnosti Akcelerometr / Gyro MPU-6000.
Barometrický tlakový senzor upgrade na MS5611–01BA03.
ATmega2560 Atmel a ATMEGA32U–2 čipy pro zpracování a USB funkce.
Senzory:
MPU-6000, šest-Axis (Gyro + akcelerometr) MEMS MotionTracking ™
HMC5883L-TR, 3-Axis digitální kompas
MediaTek MT3329 GPS 10Hz
MS5611, MEAS High Resolution Výškoměr
——————————————————————————————————————————————————————
HKPilot Mega V2.5 Flight Controller USB/GYRO/ACC/MAG/BARO
$75.79
HKPilot Mega 2.5 je kompletní open source autopilot systém s nejlepší prodávanou technikou. Tato verze je připravena k použití, bez nutnosti nastavování. To umožňuje uživateli, proměnit každé pevné křídlo, vrtulník nebo multi-rotory (dokonce i čluny a auta) v plně autonomní stroj, schopného provádění naprogramovaných GPS misí s waypointy (vyžaduje GPS modul – prodává se samostatně).
Arduino kompatibilní
předpájené a testováné
3-osé gyro, akcelerometr, magnetometr a výkonný barometr
4MB DataFlash pro automatické ukládání dat
Honeywell HMC5883L-TR Digitální kompas
6 osý Akcelerometr/Gyro MPU-6000
MS5611-01BA03 senzor barometrického tlaku.
Atmel ATmega2560 a ATMEGA32U-2 (zpracování a USB funkce).
Micro-USB
————————————————————————————————————————————————————————
UAVX-ARM32 Full Sensors

$96.50
STM32F405RG6 s FPU 168MHz (1024kB Flash/32Kb RAM)
512kbit EEPROM
MPU6050 Gyro / Akcelerometr
HMC5883L Magnetometer
MS5611 Barometr
Ultrazvukový dálkoměr (není součástí dodávky)
Volitelný externí měření stavu baterie
Analogové a I2C porty pro alternativní senzory
Velikost desky: 54 mm x 51 mm
I2C senzorová komunikace jsou 400kHz (omezení pro senzory).
Další UAVP Snímače podporované v režimu adaptéru:
Všechny analogové gyros
HMC6552 Compass (I2C omezena na 100 kHz)
BMP085 Barometr
Přijímače:
Paralelní PPM (8 kanálů)
Compound PPM (FrSky atd. nebo externí dekodér)
Spektrum Satellite (1024B a 2048B rozlišení)
Systémové sběrnice (s externím měničem)
disky:
Fast PWM (6 kanálů nebo 10 bez paralelní PPM vstup)
I2C na 400kHz
Minimálně 4 kanály jsou nutné pro základní řízení letu. 7 kanálů
potřebné pro RTH a Nav. funkce.
Další UAVP Snímače podporované v režimu adaptéru:

Napsat komentář
Pro přidávání komentářů se musíte nejdříve přihlásit.